However the data has random spikes in of 10s or 100s of degrees that shouldn’t be there. I’ve attached a picture of the Arduino serial plotter output. Overall the data looks fine apart from the spikes which occur every second or two.
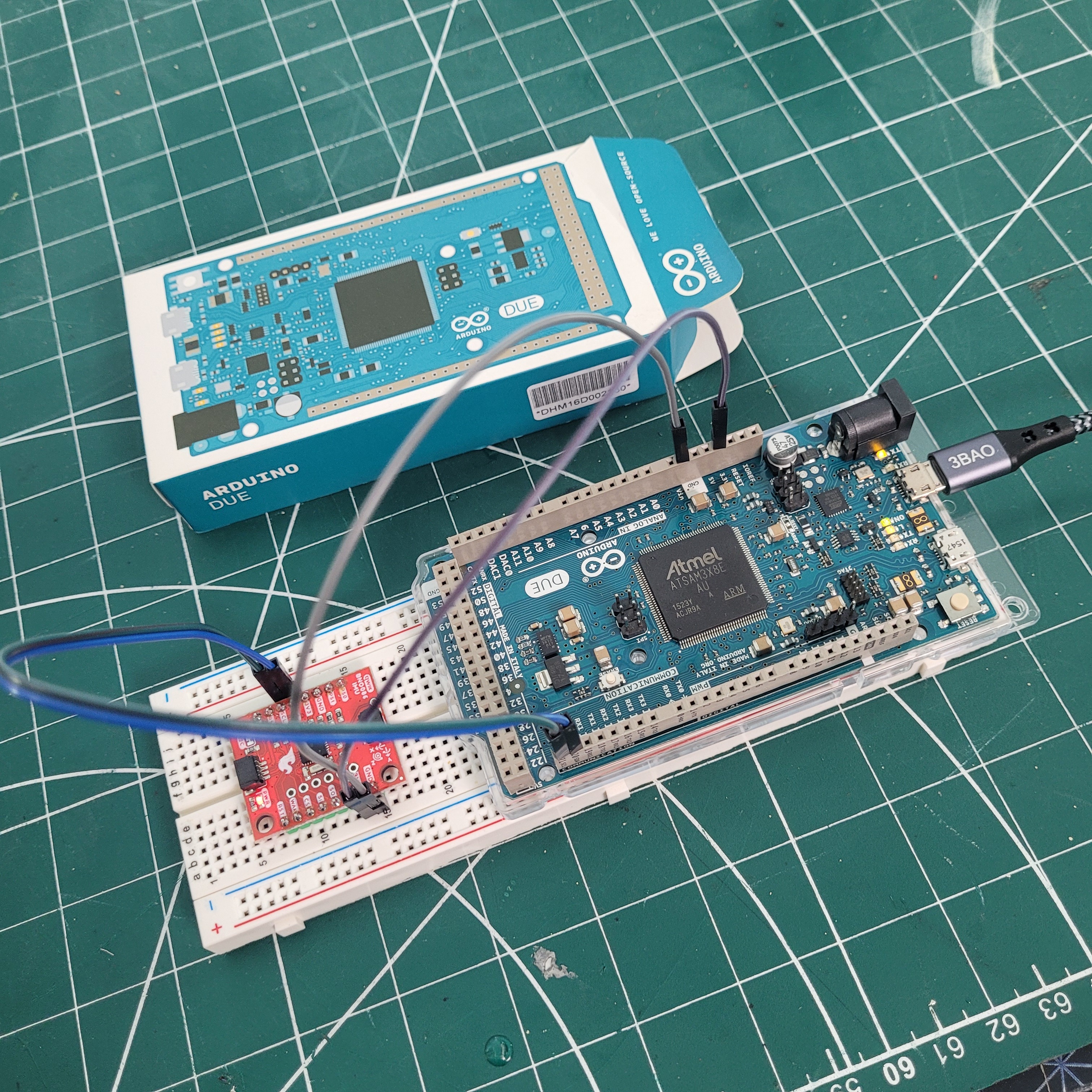
I’ve tried it with a Genuine Arduino Due and also two MKR Zeros, I’ve changed the jumper wires, the breadboard, and the USB cable. I’ve attached a pictureof the setup - its just GND and 3.3V connected and the two SDA/SCL wires.
Robosavvy also sent me a replacement BNO086 board but this gives exactly the same results.
The other Arduino examples seem to work ok, but I really want the fused sensor angles for balancing robot projects since that seems to be the main selling point.
Doing so should assist with communication to the BNO086. SPI is also another option that seems to be more reliable than just SDA/SCL as far as testing shows.
Thanks, it works now I’ve added the pin definitions and altering the begin statement by copying them from example 17.
The guide says the two extra pins and definitions are only required for the advanced examples 17 & 18 though, so it’s probably updating the other examples like 13 that require it, and correcting the documentation, rather than leaving them incomplete.