Hi there,
For a project, we are using the Garmin LIDAR-Lite V4 LED sensor in conjunction with a Teensy 4.1 board to measure distances between 5cm and 40cm however, our data seems to have an offset error to the actual value. The offset varies between 7cm and 10cm, and it only changes after a reset (i.e. unplugging and plugging in the board). On top of the offset error, the data seems to have a precision of ± 2cm, as opposed to the ±1cm as advertised. Please see the attached screenshot and image for reference.
We have checked the wiring and the code (https://github.com/garmin/LIDARLite_Ard … /v4LED.ino is from the sensor library). The only modifications made were to assign the correct pins on the Teensy in lines 49 & 50. We have also checked that it is not an issue with the surface of the “reflector” as we are using a sheet of blank paper. Tests have also concluded that the issue is not a result of ambient light in the room.
We are wondering whether these issues are due to an issue with the sensor itself.
In addition to that, we were wondering if there is a way to get more decimal places from the data. i.e. more than integer values from the sensor.
Thanks!
In the data sheet I’m seeing a resolution of 1cm (not precision) and a minimum range of 5cm.
A resolution of 1cm means you can’t get more decimal places, the smallest unit of measure would be 1cm.
Are you in high accuracy mode and are you taking many measurements and averaging them? Are you set to measure in the lowest range?
Hi,
Thanks for the reply and the clarification on the resolution of the sensor.
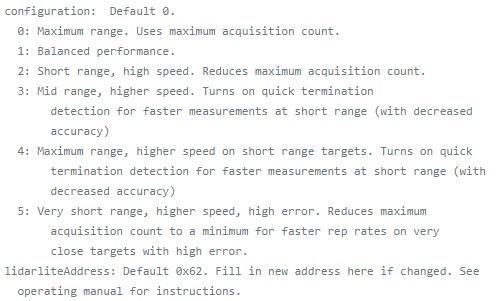
I believe the sensor is currently set to its default acquisition mode, mode 0 with maximum range. Looking at the options, I am not sure which to select, as none of the options indicate “high accuracy”. The best match seems to be mode 2. Is that what you are referring to? I have attached an image of the options available below.
For our use case, we are planning to pull data from the sensor continuously, as we are hoping to use the sensor to triangulate the position of an object. Because of this, I am unsure whether we will be able to average the data when the sensor is used in situ.
We are also currently trying to collect some data with the sensor to hopefully create a lookup table, but we will have to first verify that the error is constant or linear and stays consistent between trials.
I am also seeing significant errors, especially below 100cm, although repeatability seems pretty good. I ran a bunch of experiments, and you can see the data at
https://www.fpaynter.com/2023/02/garmin … led-study/
Did you have any luck with a calibration lookup table?
TIA,
Frank

