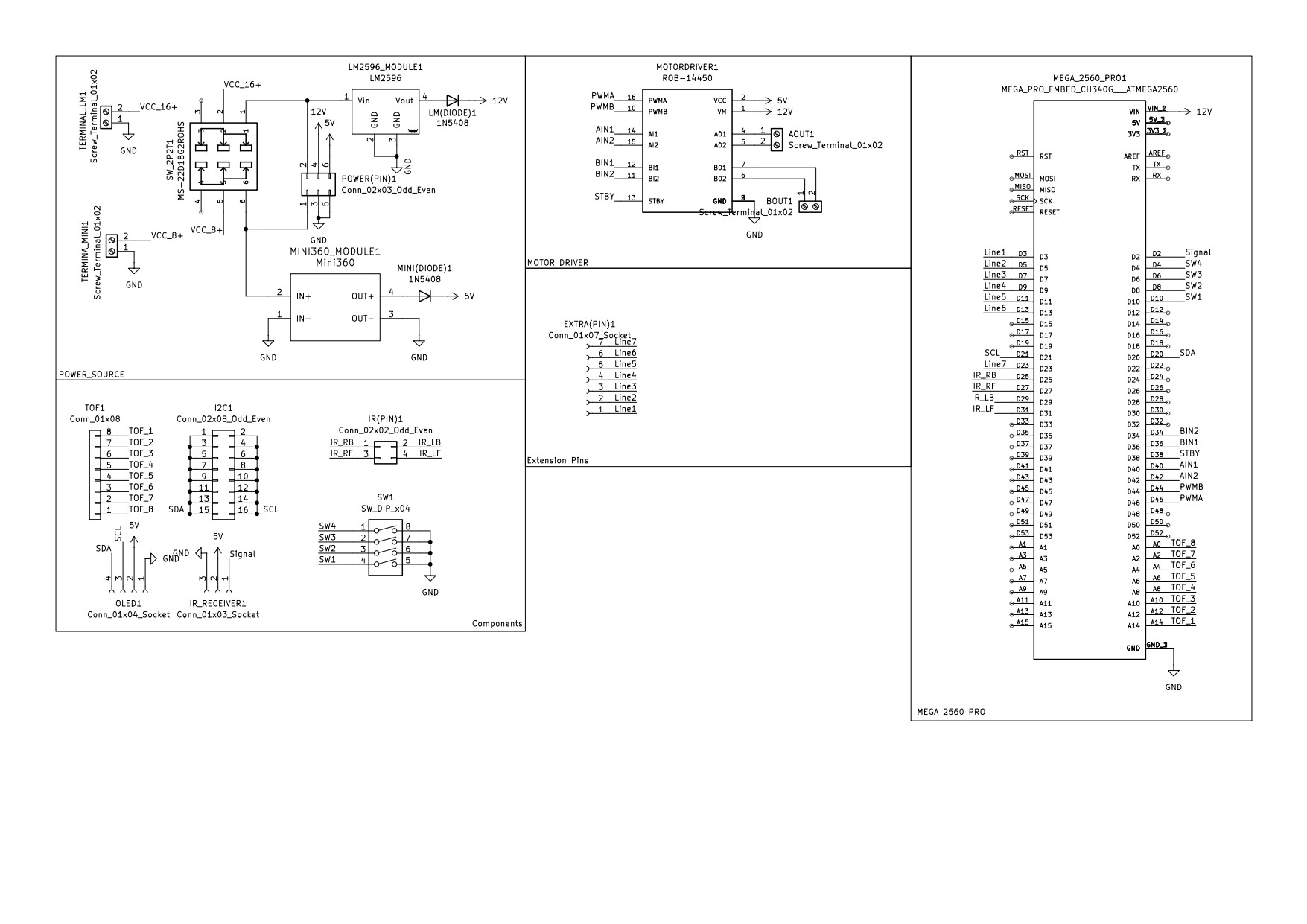
I want to know the cause of the error that led to my TB6612FNG burning out suddenly after I changed the code. Attached underneath is the schematic of my connection. So basically what happened was I was testing if all functionality of TB6612FNG works as i was checking if it responded on time and properly to my Time of Flight as the project is a sumobot then when I went ahead and change everything regarding the sensors and went and put only Backward(motor1,motor2,180) within the loop with no delay. My TB6612FNG goes into smoke suddenly, and after that, I can’t use it anymore, and the LM module is making a noise when I turn everything on.
Specs of the Motor (I am using 4 motors and 2 each for Aout and Bout)
DC Gear Motor 12V 915RPM - SGM25-370
Specifications:
-
Operating voltage: between 6 V and 18 V
-
Nominal voltage: 12 V
-
Free-run speed at 12 V: 915 RPM
-
Free-run current at 12 V: 50 mA
-
Stall current at 12 V: 1200 mA
-
Stall torque at 12 V: 1 kg.cm
-
Gear ratio: 1:9.6
-
Reductor size: 17.5 mm
-
Weight: 82 g
-
Product dimension: 48.3mm x 25mmØ
-
Shaft diameter: 4mm
-
Shaft length: 8mm