Am I performing a stationary RTK without height correctly with the ZED-F9P receiver and the ANN-MB-00-00 antenna? Does stationary mean static ?
I have configured the receiver in the u-center application:
-
I have enabled only GPS and Galileo constellations for best accuracy
GNSS (GNSS Config) → SBAS → Enable = empty
BeiDou → Enable = empty
QZSS → Enable = empty
GLONASS → Enable = empty
Send -
I set the measurement to stationary
NAV5 (Navigation 5) → Dynamic Model = 2 - Stationary
Fix Mode = 1 - 2D only
Send -
I set the ZED-F9P to determine position for 3 seconds based on the last message from the base station. The base station sends messages 1/sec.
NAV5 (Navigation 5) → DGNSS Timeout = 3
Send -
I have enabled raw messaging for the USB port
MSG(Messages) → Message = 02-15 RXM-RAWX
USB → On
SendMSG(Messages) → Message = 02-13 RXM-SFRBX
USB → On
Send -
I saved the configuration
CFG(Configuration) → Save current configuration
Send
My ZED-F9P receiver is a dual-frequency receiver L1/L2, so at my measurement location the sky should not be obscured by trees and buildings and should be at least 5 m from any terrain obstacles.
I placed the antenna with a metal round base connected to the ZED-F9P receiver on a round, level base on a tripod about 1.5m above the ground. The base’s task is to shield the antenna from below. Therefore, it should not be too large. The diameter of the base is a few centimeters larger than the diameter of the antenna. If it is too large, it will cause additional signal reflections and will be very susceptible to even small gusts of wind.
-
The ZED-F9P receiver with 1.51 firmware is connected via USB to the laptop. The laptop has an Internet connection.
-
I am launching the u-center application 25.03.
-
I set the baud rate in the menu
Receiver → Baudrate → 115’200 -
I connect the application to the module in the menu
Receiver → Connection → COMx -
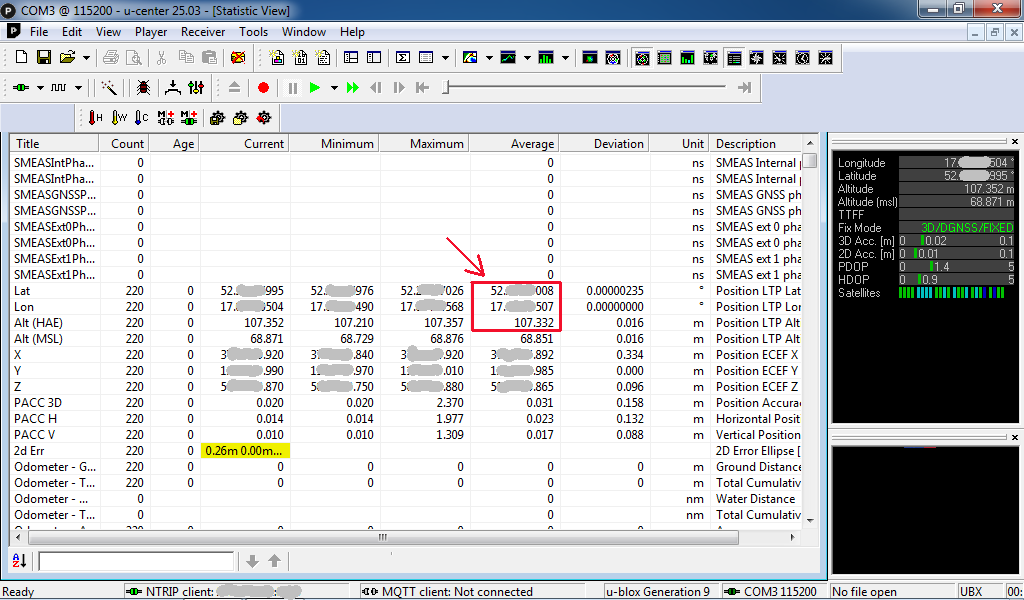
I provide a window to display Fix mode by checking the selection in the menu
View → Docking Windows → Data
In the Data window, the Fix Mode field should display 2D. -
I enable receiving messages from the base station by selecting from the menu
Receiver → NTRIP Client…
Address:
Port:
Username:
Password:
NTRIP mount point:
I click OK.
If the connection to receive data from the base station was successful, the status at the bottom of the window will be NTRIP client: ip_address:port. The Fix mode field value in the Data window will change from 2D to 2D/DGNSS or 2D/DGNSS/Float. The base reference station is less than 10 km from the measurement site. -
In the menu I select View → Deviation Map to display a window with the measurement position.
-
I click the button with the letter A at the bottom of the Deviation Map window meaning Set centre to average position.
-
I wait until the Fix mode field in the Data window changes to 2D/DGNSS/Fixed. This may take a few minutes.
-
When Fix mode is set to 2D/DGNSS/Fixed I click the Empty database button at the top to start collecting data from the beginning.
-
I click the Properties button of the Deviation Map window located at the bottom, on the left side of this window. The Deviation Map Properties window will appear, in which the first field should be set to Average, and the Max. Deviation field should be set to 0.04. This is used to observe how large the spread of measurements is. If the measurements go outside the 2 cm circle, then we probably have low measurement quality. I click OK.
-
I save the measurement results by selecting Player → Record in the menu. A window with a suggested file name will appear. I click save and confirm adding the receiver configuration by clicking Yes. Now the measurement results are saved to a file.
-
I wait about 2 minutes, during which Fix mode should be 2D/DGNSS/Fixed all the time.
-
I finish saving the results by selecting Player → Eject in the menu. I disconnect the NTRIP service by selecting Receiver → NTRIP Client… from the menu and disconnect the U-Center application from the receiver Receiver → Connection → Disconnect
-
I open the Player → Scan measurement file, select the file and click Open. I play the file to the end Player → Play → Maximum throughput and in the lower right corner of the Deviation Map window I read two numbers defining the average position. These are the 3D coordinates without height. Note: Not to be confused with the Longitude and Latitude fields of the Data window, which are usually located in the upper right corner.
-
I disconnect the measurement file Player → Eject

Then using the Proj program, I transform the received 3D coordinates without height to the map system, i.e. the 2D system.