Hi Sparkfun Support Team,
My team is running into issues with the L6470 AutoDriver board, and I’m looking for assistance determining whether we’ve really killed the boards, or whether we’re just making some obvious mistake in hooking them up that is impacting communications. Here’s our situation:
-
Bought 3 AutoDriver boards to drive [these motors , using a RedBoard for command generation.
-
Colleague hooked all three boards up following the [multiple board example. I wasn’t here for this, so I can’t speak to whether they modified the connections between the boards (or the pin assignments in the example code) correctly.
– They were using a variable power supply ([this guy) set to 30V. Unfortunately, I believe the current limit was set to 30A - so if the board asked for more than it could handle, it got walloped.
– They reported that the first time they tested the three-motor system, they heard a THUNK, and then nothing. Suspect this was one of the motors moving and then stopping.
- Later, when trying to debug why the program seemed to be frozen at Line 15 in SparkFunwantYouGone, they noticed smoke coming from the charge pump diode on one of the boards, similar to what [this user reported. At this point, they stopped their experiments and called me.
I’m now trying to ascertain whether one or all of the boards are in fact fried (and if so, whether I can fix them) - or if I’ve just goofed up the hookups and am simply preventing communications between the RedBoard and the AutoDriver. Here’s what I’ve done so far:
-
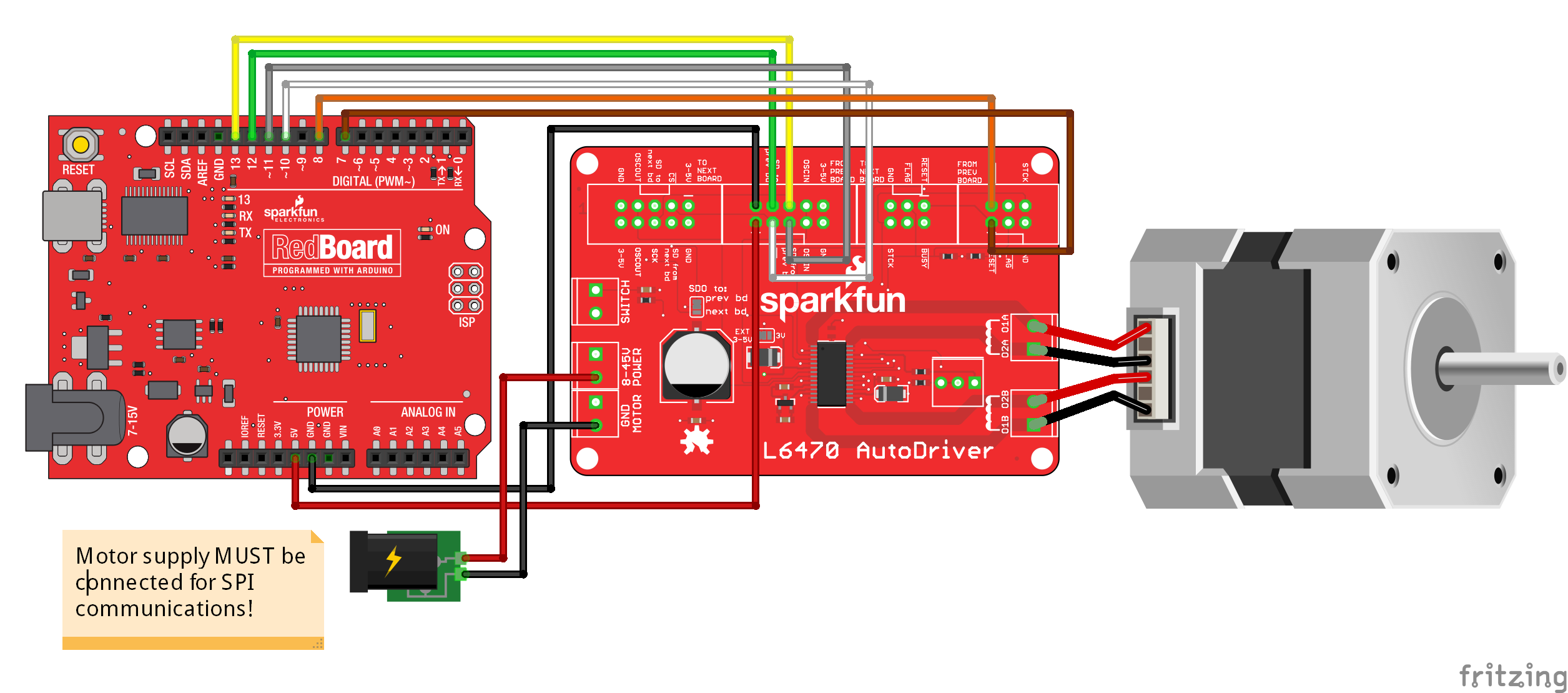
Created a single driver setup following [this diagram from the hookup guide
-
Powered the AutoDriver from a Rigol DP821 power supply set to 36V with a 1A current limit
-
Used the SparkFunGetSetParamTest example code, with the following important modifications (only pasting in the parts that I’ve changed):
AutoDriver board(0, 10, 7);
String name = "";
unsigned long temp;
boolean tempBool;
byte tempByte;
float tempFloat;
int tempInt;
int tempInt2;
boolean pass = true;
void setup()
{
Serial.begin(9600);
// Start by setting up the pins and the SPI peripheral.
// The library doesn't do this for you!
pinMode(7, OUTPUT);
pinMode(MOSI, OUTPUT);
pinMode(MISO, INPUT);
pinMode(13, OUTPUT);
pinMode(10, OUTPUT);
digitalWrite(10, HIGH);
digitalWrite(7, LOW);
digitalWrite(7, HIGH);
SPI.begin();
SPI.setDataMode(SPI_MODE3);
Note that I downloaded the library from [this repo because it was more recently updated - not [this repo, which is linked to in the hookup guide.
I’ve also attached photos of my complete setup, so you all can check my wiring.
What I’ve observed so far:
-
All three of the boards fail all of the tests - they report Config and Status reg values of 0, all other tests report 0 and fail, etc.
-
The board that had the magic smoke let out of the charge pump diodes also let smoke out of its 10uF capacitor!
-
As expected, none of the boards seem to do ANYTHING to the motor. I’ve scoped the motor output pins, and nothing shows up.
So - what are my options here? Am I correct that all of my boards are likely smoked (pretty sure the one is…) - or did I make a hookup mistake? What do you recommend for repairing these if so?
Thanks, all!
Julian](GitHub - sparkfun/L6470-AutoDriver: BabyDriver stepper board. SPI driven 3A 8-45V, based on L6470 part from Linear)](GitHub - sparkfun/SparkFun_AutoDriver_Arduino_Library: Arduino library support for the SparkFun AutoDriver board based on the ST Micro L6470 stepper driver.)](https://cdn.sparkfun.com/assets/learn_tutorials/5/5/8/autodriver_single.png)](https://forum.sparkfun.com/viewtopic.php?f=107&t=54160)](Amazon.com)](https://learn.sparkfun.com/tutorials/getting-started-with-the-autodriver---v13?_ga=2.151932537.1728160400.1660165186-1334715767.1635174352&_gac=1.221196522.1658331937.Cj0KCQjwz96WBhC8ARIsAATR250vqKlSibCLj-pqp5nvQO7Q6E4Z99xqWYugxeFd9ywHDm9IqXjvr1MaAkIDEALw_wcB#single-board-example)](https://www.automationdirect.com/adc/shopping/catalog/motion_control/stepper_systems/single_shaft_stepper_motors/stp-mtr-23055)


{kind=link}