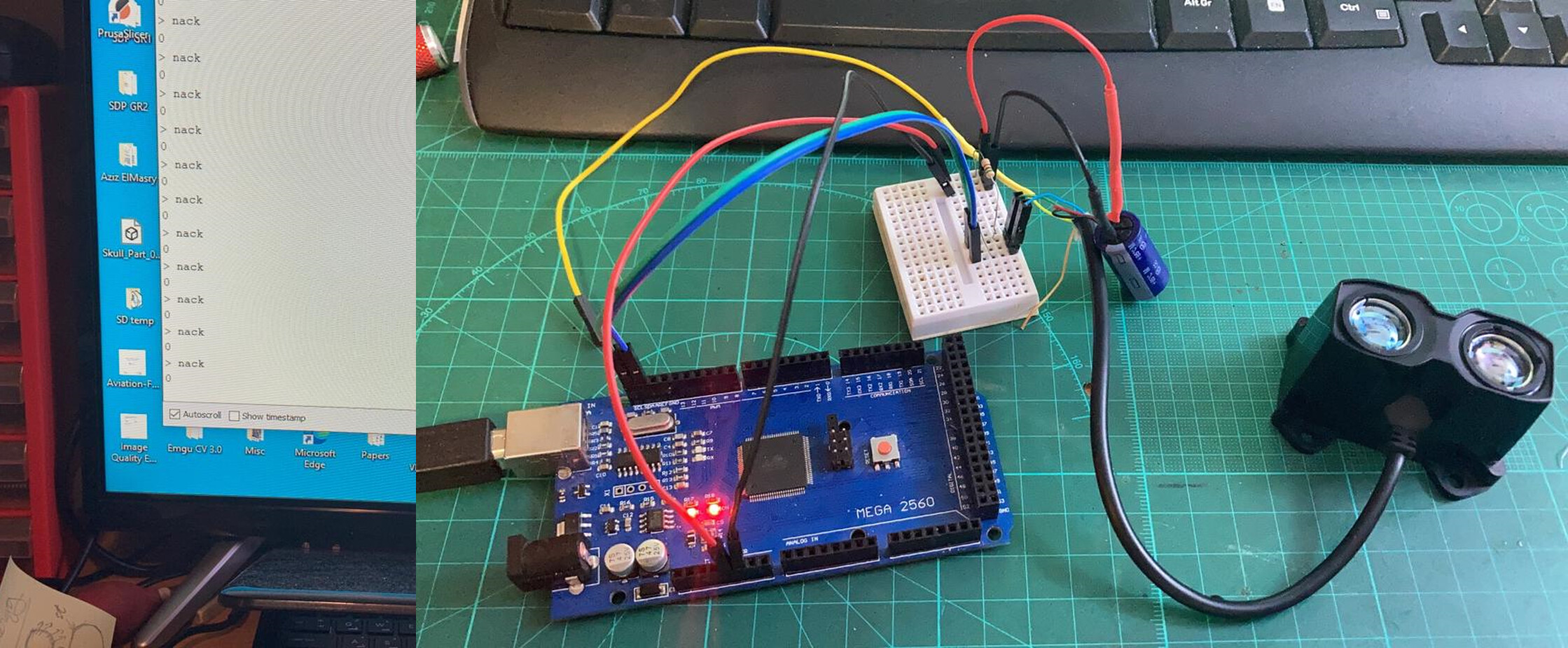
I have purchased the Lidar lite v3HP last week and I am testing it on Arduino code using the i2c , and I am getting a “nack”. (Device did not acknowledge). The wiring was done as mentioned in the Garmin datasheet. The green wire (SCL), blue wire (SDA), the red wire in +5V, and the black wire to GND. Also, I have a decoupling capacitor between the power wires. Here is the code I am using:
/*------------------------------------------------------------------------------
LIDARLite Arduino Library
v3HP/v3HP_I2C
This example shows methods for running the LIDAR-Lite v3 HP in various
modes of operation. To exercise the examples open a serial terminal
program (or the Serial Monitor in the Arduino IDE) and send ASCII
characters to trigger the commands. See "loop" function for details.
Connections:
LIDAR-Lite 5 Vdc (red) to Arduino 5v
LIDAR-Lite I2C SCL (green) to Arduino SCL
LIDAR-Lite I2C SDA (blue) to Arduino SDA
LIDAR-Lite Ground (black) to Arduino GND
(Capacitor recommended to mitigate inrush current when device is enabled)
680uF capacitor (+) to Arduino 5v
680uF capacitor (-) to Arduino GND
See the Operation Manual for wiring diagrams and more information:
http://static.garmin.com/pumac/LIDAR_Lite_v3HP_Operation_Manual_and_Technical_Specifications.pdf
------------------------------------------------------------------------------*/
#include <stdint.h>
#include <Wire.h>
#include <LIDARLite_v3HP.h>
LIDARLite_v3HP myLidarLite;
#define FAST_I2C
enum rangeType_T
{
RANGE_NONE,
RANGE_SINGLE,
RANGE_CONTINUOUS,
RANGE_TIMER
};
void setup()
{
// Initialize Arduino serial port (for display of ASCII output to PC)
Serial.begin(115200);
// Initialize Arduino I2C (for communication to LidarLite)
Wire.begin();
#ifdef FAST_I2C
#if ARDUINO >= 157
Wire.setClock(400000UL); // Set I2C frequency to 400kHz (for Arduino Due)
#else
TWBR = ((F_CPU / 400000UL) - 16) / 2; // Set I2C frequency to 400kHz
#endif
#endif
// Configure the LidarLite internal parameters so as to lend itself to
// various modes of operation by altering 'configure' input integer to
// anything in the range of 0 to 5. See LIDARLite_v3HP.cpp for details.
myLidarLite.configure(0);
}
void loop()
{
uint16_t distance;
uint8_t newDistance = 0;
uint8_t c;
rangeType_T rangeMode = RANGE_NONE;
PrintMenu();
// Continuous loop
while (1)
{
// Each time through the loop, look for a serial input character
if (Serial.available() > 0)
{
// read input character ...
c = (uint8_t) Serial.read();
// ... and parse
switch (c)
{
case 'S':
case 's':
rangeMode = RANGE_SINGLE;
break;
case 'C':
case 'c':
rangeMode = RANGE_CONTINUOUS;
break;
case 'T':
case 't':
rangeMode = RANGE_TIMER;
break;
case '.':
rangeMode = RANGE_NONE;
break;
case 'D':
case 'd':
rangeMode = RANGE_NONE;
dumpCorrelationRecord();
break;
case 'P':
case 'p':
rangeMode = RANGE_NONE;
peakStackExample();
break;
case 0x0D:
case 0x0A:
break;
default:
rangeMode = RANGE_NONE;
PrintMenu();
break;
}
}
switch (rangeMode)
{
case RANGE_NONE:
newDistance = 0;
break;
case RANGE_SINGLE:
newDistance = distanceSingle(&distance);
break;
case RANGE_CONTINUOUS:
newDistance = distanceContinuous(&distance);
break;
case RANGE_TIMER:
delay(250); // 4 Hz
newDistance = distanceFast(&distance);
break;
default:
newDistance = 0;
break;
}
// When there is new distance data, print it to the serial port
if (newDistance)
{
Serial.println(distance);
}
// Single measurements print once and then stop
if (rangeMode == RANGE_SINGLE)
{
rangeMode = RANGE_NONE;
}
}
}
void PrintMenu(void)
{
Serial.println("=====================================");
Serial.println("== Type a single character command ==");
Serial.println("=====================================");
Serial.println(" S - Single Measurement");
Serial.println(" C - Continuous Measurement");
Serial.println(" T - Timed Measurement");
Serial.println(" . - Stop Measurement");
Serial.println(" D - Dump Correlation Record");
Serial.println(" P - Peak Stack Example");
}
//---------------------------------------------------------------------
// Read Single Distance Measurement
//
// This is the simplest form of taking a measurement. This is a
// blocking function as it will not return until a range has been
// taken and a new distance measurement can be read.
//---------------------------------------------------------------------
uint8_t distanceSingle(uint16_t * distance)
{
// 1. Wait for busyFlag to indicate device is idle. This must be
// done before triggering a range measurement.
myLidarLite.waitForBusy();
// 2. Trigger range measurement.
myLidarLite.takeRange();
// 3. Wait for busyFlag to indicate device is idle. This should be
// done before reading the distance data that was triggered above.
myLidarLite.waitForBusy();
// 4. Read new distance data from device registers
*distance = myLidarLite.readDistance();
return 1;
}
//---------------------------------------------------------------------
// Read Continuous Distance Measurements
//
// The most recent distance measurement can always be read from
// device registers. Polling for the BUSY flag in the STATUS
// register can alert the user that the distance measurement is new
// and that the next measurement can be initiated. If the device is
// BUSY this function does nothing and returns 0. If the device is
// NOT BUSY this function triggers the next measurement, reads the
// distance data from the previous measurement, and returns 1.
//---------------------------------------------------------------------
uint8_t distanceContinuous(uint16_t * distance)
{
uint8_t newDistance = 0;
// Check on busyFlag to indicate if device is idle
// (meaning = it finished the previously triggered measurement)
if (myLidarLite.getBusyFlag() == 0)
{
// Trigger the next range measurement
myLidarLite.takeRange();
// Read new distance data from device registers
*distance = myLidarLite.readDistance();
// Report to calling function that we have new data
newDistance = 1;
}
return newDistance;
}
//---------------------------------------------------------------------
// Read Distance Measurement, Quickly
//
// Read distance. The approach is to poll the status register until the device goes
// idle after finishing a measurement, send a new measurement command, then read the
// previous distance data while it is performing the new command.
//---------------------------------------------------------------------
uint8_t distanceFast(uint16_t * distance)
{
// 1. Wait for busyFlag to indicate device is idle. This must be
// done before triggering a range measurement.
myLidarLite.waitForBusy();
// 2. Trigger range measurement.
myLidarLite.takeRange();
// 3. Read previous distance data from device registers.
// After starting a measurement we can immediately read previous
// distance measurement while the current range acquisition is
// ongoing. This distance data is valid until the next
// measurement finishes. The I2C transaction finishes before new
// distance measurement data is acquired.
*distance = myLidarLite.readDistance();
return 1;
}
//---------------------------------------------------------------------
// Print the correlation record for analysis
//---------------------------------------------------------------------
void dumpCorrelationRecord()
{
myLidarLite.correlationRecordToSerial(256);
}
//---------------------------------------------------------------------
// Print peaks and calculated distances from the peak stack
//---------------------------------------------------------------------
void peakStackExample()
{
int16_t peakArray[8];
int16_t distArray[8];
uint8_t i;
// - Read the Peak Stack.
// - Peaks and calculated distances are returned in local arrays.
// - See library function for details on the makeup of the stack
// and how distance data is created from the stack.
myLidarLite.peakStackRead(peakArray, distArray);
// Print peaks and calculated distances to the serial port.
Serial.println();
Serial.println("IDX PEAK DIST");
for (i=0 ; i<8 ; i++)
{
Serial.print(i);
Serial.print(" ");
Serial.print(peakArray[i]);
Serial.print(" ");
Serial.print(distArray[i]);
Serial.println();
}
}
What I am getting is:
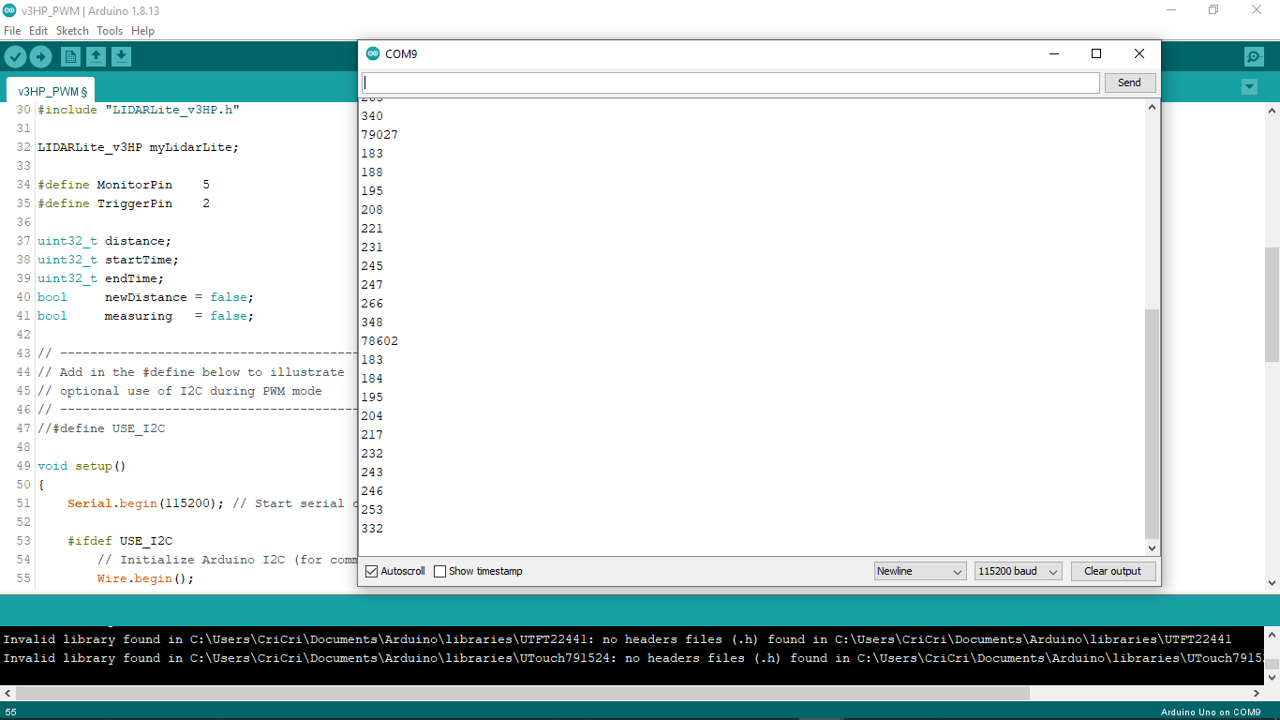
Also, I have tried using the PWM example code:
/*------------------------------------------------------------------------------
LIDARLite Arduino Library
v3HP/v3HP_PWM
This example shows how to read distance from a LIDAR-Lite connected over the
PWM interface.
Connections:
LIDAR-Lite 5 Vdc (red) to Arduino 5v
LIDAR-Lite Ground (black) to Arduino GND
LIDAR-Lite Mode control (yellow) to Arduino digital input (pin 3)
LIDAR-Lite Mode control (yellow) to 1 kOhm resistor lead 1
1 kOhm resistor lead 2 to Arduino digital output (pin 2)
Optional Connections -
LIDAR-Lite I2C SCL (green) to Arduino SCL
LIDAR-Lite I2C SDA (blue) to Arduino SDA
(Capacitor recommended to mitigate inrush current when device is enabled)
680uF capacitor (+) to Arduino 5v
680uF capacitor (-) to Arduino GND
See the Operation Manual for wiring diagrams and more information:
http://static.garmin.com/pumac/LIDAR-Lite_v3HP_Instructions_EN.pdf
------------------------------------------------------------------------------*/
#include <stdint.h>
#include <Wire.h>
#include "LIDARLite_v3HP.h"
LIDARLite_v3HP myLidarLite;
#define MonitorPin 5
#define TriggerPin 2
uint32_t distance;
uint32_t startTime;
uint32_t endTime;
bool newDistance = false;
bool measuring = false;
// -----------------------------------------
// Add in the #define below to illustrate
// optional use of I2C during PWM mode
// -----------------------------------------
//#define USE_I2C
void setup()
{
Serial.begin(115200); // Start serial communications
#ifdef USE_I2C
// Initialize Arduino I2C (for communication to LidarLite)
Wire.begin();
Wire.setClock(400000UL); // Set I2C frequency to 400kHz (for Arduino Due)
#endif
pinMode(MonitorPin, INPUT);
pinMode(TriggerPin, OUTPUT);
digitalWrite(TriggerPin, LOW); // Set trigger LOW for continuous read
startTime = micros();
endTime = startTime;
}
void loop()
{
if (digitalRead(MonitorPin))
{
if (measuring == false)
{
startTime = micros();
measuring = true;
}
}
else
{
if (measuring == true)
{
endTime = micros();
measuring = false;
newDistance = true;
}
}
// If we get a new reading, print it
if (newDistance == true)
{
distance = (endTime - startTime) / 10; // 10usec = 1 cm of distance
Serial.println(distance); // Print measured distance
#ifdef USE_I2C
uint8_t signalStrength = 0;
myLidarLite.read(0x0e, &signalStrength, 1);
Serial.print("SS = ");
Serial.println(signalStrength, DEC);
Serial.println();
#endif
newDistance = false;
}
}
Here, I got interesting results as shown:
I don’t know what is going on.
Your help is highly appreciated