I purchased a SparkFun JetBot AI Kit V3.0 in late-December 2022.
Issue #1
When booting off the supplied micro-SD card (JetBot Image Pre-Flashed), I only get a screen with the Nvidia logo on a white background that goes to black entirely after a few seconds. I tried multiple cables and power sources which did not help. The JetBot is not usable with the black screen.
Troubleshooting
I went to SparkFun’s assembly guide page (https://learn.sparkfun.com/tutorials/as … rom-nvidia). I performed all of the next steps on a new Samsung 64gb “Evo Plus” micro-SD card, as I did not want to risk damaging the original Kensington “Canvas Go! Plus” micro-SD card from SparkFun.
Sorry, about the boot up issue. The production team lost the SD card they used to clone the one we include in the kits. When I made them a new one, I think I might have given them the latest image I had been working on (which required some tutorial updates). The latest image on our SD cards uses Jetpack 4.5; and therefore, would require users to first use a fresh image to upload the new firmware, as mentioned in the new [jetbot documentation.
I currently don’t have time this week to update the tutorial, but I should be able to get it done soon. I was able to get our modifications for the jetbot software pulled into the Nvidia jetbot repository, so users should be able to just follow the [software setup section of the new documentation.
Thanks to both TS-Russell and Santa_Impersonator! My son and I will work on the suggestions this weekend. We are both new to Linux, so the experience to date has been VERY challenging – I suppose in a good way because we are learning.
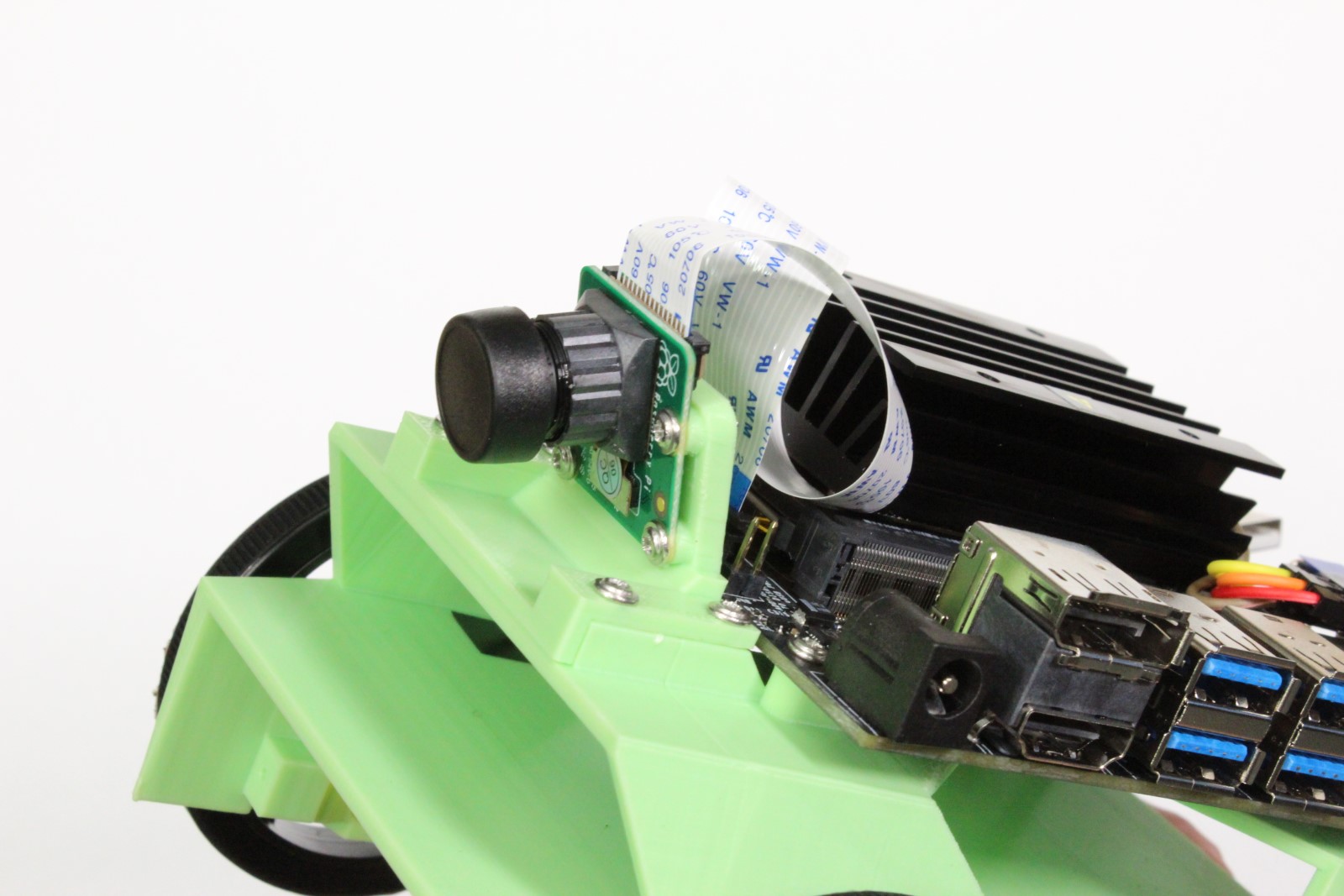
Whilst we are on the topic of the Jetbot, would you please have a quick look at the attached photo? If this flat cable supposed to be bent around? I cannot get it to fit any other way.
Some of the earlier ones also required twisting the cable; manufacturers regularly change the orientation…but it should work fine, the important part is ensuring that the pins on the cable face INward (toward the middle of jetson board)
I just checked all the open boxes of those cameras in our warehouse… they are all the same with the contact on the same side as the camera lens. Therefore, you shouldn’t need the twist in the cable. You should be able to follow the images in the [assembly guide and just rotate the ribbon cable backwards into the camera slot.
We are still experiencing issues after following the instructions from Santa_Impersonator. Hopefully, you can provide a little more guidance. I feel that we are getting closer.
Flashed micro-SD card as follows:
Platform Jetson Nano (4gb)
JetPack Version 4.5
JetBot Version 0.4.3
Inserted the micro-SD card into the Jetson Nano
Connected the monitor, keyboard and mouse to the Nano
Powered on the Nano by connecting to the battery. We also tried connecting directly to a 5v iPhone power adapter
If the error message is too annoying, you can also disable the background service running for the screen:
- If you are using the latest instructions from Nvidia, you can disable the Docker container; as shown [[here](https://jetbot.org/master/reference/docker_tips.html#disabling-containers). To re-enable the container, use the same instructions, but use **enable.sh**.
- If your are using the older instructions, you can stop the background service running the OLED screen.
sudo systemctl stop <service name>
I believe the service name was called jetbot_stats.service
Thanks for your help. Unfortunately, we have not been able to advance.
The micro-OLED display is connected but not working, as per the attached photo.
Please note that we had the micro-OLED working in an earlier version of the Jetpack system. When we flashed the micro-SD card with Jetpack 4.3 (https://github.com/NVIDIA-AI-IOT/jetbot … ware-setup) and added the modification files (https://cdn.sparkfun.com/assets/learn_t … jetbot.zip) using the Ubuntu operating system, the micro-OLED worked fine. Now with Jetpack version 4.5, we cannot get to the operating system, so we cannot install the modification files and hence do not have the micro-OLED display functioning.
I should also note that no wiring was changed for the micro-OLED display.
We attempted to avoid the error message by entering the command (sudo systemctl stop jetbot_stats.service) but were unable to enter the command because the error message would appear before we could even finish entering the text. I have attached a photo of the screen.
We would really appreciate some help to get past this issue. We are happy to continue on the forum or participate in a call for real-time advice. (We are in Melbourne, Australia for time reference.)
I believe once you transition to Jetpack 4.5, you cannot use an older Jetpack version due to the updated firmware on the board. Jetbot 0.4.3 also utilizes a docker container to run the jetbot software and should be used with their [latest instructions. (Sorry, it looks like the links for the different instructions didn’t get added in my previous post, but that is why the older instructions aren’t working.)
Let’s start from scratch… It’ll be easier to start from scratch then try to fix everything.
- **I would recommend following Nvidia's instructions, and flash a [[fresh image](https://jetbot.org/master/software_setup/sd_card.html) onto your SD card.[/b]**
*If you skip [[their instructions to download the jetbot software and utilize the docker containers](https://jetbot.org/master/software_setup/docker.html)... the error message shouldn't appear. It's when you add and run the jetbot software that the error message will start popping up.*
__**__
*
- However, once you want to proceed with that, I was able to get a pull request merged for our hardware (earlier this year). Therefore, you no longer need to add the modification files and you can just follow [[their instructions to download the jetbot software and utilize the docker containers](https://jetbot.org/master/software_setup/docker.html).
*
__*[/list][/i]*__
_
- **Let's skip adding the jetbot software** *(italics above)* **and focus on adding the driver for the WiFi adapter, next. That way, we can avoid having to go back and disable the docker container.**_
__**__
__*
- For the WiFi driver, please follow the [[README](https://github.com/lwfinger/rtl8723bu/blob/master/README.md) of the [[rtl8723bu repository](https://github.com/lwfinger/rtl8723bu).*__
__**__
__*
- If the automatic installation doesn't work, make sure you are in the directory of the cloned repository. Otherwise, you may need to manually install the driver.
*__
__*
- If you run into connection issues after installing the drivers, you may need to run the wifi adapter in [[non-concurrent mode](https://github.com/lwfinger/rtl8723bu/blob/master/README.md#concurrent-or-non-concurrent-mode).
*__
__*[/list]*__
*
- You can try this [[old script](https://github.com/santaimpersonator/sparkfun_jetbot_setup/blob/main/add-on_software/install_edimax_driver.sh) I have for adding the WiFi driver.*
__**__
_
- *I can't guarentee that it'll work. It's been a while and I don't remember if it required another script to be executed before hand or if it was fine as a standalone.*
We have successfully completed the installation and were able to remotely log into the device from another pc using the https://. However issues are still occurring.
On booting of the device, the error message in the attached screenshot consistently display.
What is the imx219_board?
What is the Bluetooth device that is failing?
Please see attached syslog regarding
tegra-i2c 7000c400.i2c: no acknowledge from address 0x3c
when using the command provided to stop the service
sudo systemctl stop jetbot_stats.service (also tried with jetbot_stats)
Error message “ failed to stop jetbot_status.service: Unit jetbot_stats.service not loaded.
If this process is trying to access the OLED display – it is failing and the OLED display is not activating.
Attached are copies of the Syslog and output of process table showing all processes running after reboot.
Are there any missing processes?
I have also attached a copy of the syslog – there seems to be a lot of error messages, and I am not sure if any of these are important.
When running ifconfig – there is no device wlan1 - is this important?
The device was moved to another location and we have not been able to reconnect to the device by a browser using the https:// which may be an issue with the internet connection at the second location that was not present before. I will try to take the device back to original site and retest.
- Those are just startup errors that you can ignore.
- imx219_board is the camera module
- The Bluetooth device is failing because you have none plugged in
- So it looks like there was a bit of confusion here:
- Nvidia now includes the jetbot software in the latest image release, which I wasn't aware of. (Maybe I didn't remember... but I was able to borrow a Jetson from a coworker and just realized the issue on my part.)
- When I mentioned a fresh image, I was thinking of one without the jetbot software [[jetson-nano-jp461-sd-card-image](https://developer.nvidia.com/jetson-nano-sd-card-image)
- It looks like you are using the latest release image [[jetbot-043_nano-4gb-jp45](https://drive.google.com/file/d/1o08RPDRZuDloP_o76tCoSngvq1CVuCDh/view?usp=sharing), which already had the jetbot software installed and the Docker container running.
[/list]
- Without having to flash a new image, let's stop/disable the Docker container
- Don't use the **systemctl** command. That only works with the jetbot software in versions 4.0 and earlier (JetPack 4.3 and earlier)
- **Nvidia has a script you can use to disable the docker container** (so the i2c error message will stop printing)
- From the home directory, navigate to the docker folder: ```
cd /jetbot/docker
```
- Execute the shell script:```
./disable.sh
```
- If you want to re-enable the Docker container, to run the examples... there is an enable script. You can [[follow these directions here](https://jetbot.org/master/software_setup/docker.html). **(Hold off on this until we get your WiFi driver installed)**
Thanks. Simondownunder and I are currently working on this device.
We have connectivity via wireless to the Jetbot device, and am able to successfully ping the Jetbot from a remote PC, and able to successfully ping the PC from the Jetbot terminal.
When we try to connect via the browser, this is now failing - timing out.
The OLED display on the Jetbot has not worked recently - it looks to be securely connected physically. Any suggestions as to how to troubleshoot pls?
2 What processes need to be running to allow a PC to connect via http?
3 Should the Port 8888 appear in output from netstat? It does not currently appear.
- Make sure to configure your system, be for enabling the docker container: [https://jetbot.org/master/software_setu ... ure-system](https://jetbot.org/master/software_setup/docker.html#step-4-configure-system)
- Instructions to enable the docker container: [https://jetbot.org/master/software_setu ... containers](https://jetbot.org/master/software_setup/docker.html#step-5-enable-all-containers)
Santa_Impersonator:
I believe once you transition to Jetpack 4.5, you cannot use an older Jetpack version due to the updated firmware on the board. Jetbot 0.4.3 also utilizes a docker container to run the jetbot software and should be used with their [latest instructions. (Sorry, it looks like the links for the different instructions didn’t get added in my previous post, but that is why the older instructions aren’t working.)
Let’s start from scratch… It’ll be easier to start from scratch then try to fix everything.
- **I would recommend following Nvidia's instructions, and flash a [[fresh image](https://jetbot.org/master/software_setup/sd_card.html) onto your SD card.[/b]**
*If you skip [[their instructions to download the jetbot software and utilize the docker containers](https://jetbot.org/master/software_setup/docker.html)... the error message shouldn't appear. It's when you add and run the jetbot software that the error message will start popping up.*
__**__
*
- However, once you want to proceed with that, I was able to get a pull request merged for our hardware (earlier this year). Therefore, you no longer need to add the modification files and you can just follow [[their instructions to download the jetbot software and utilize the docker containers](https://jetbot.org/master/software_setup/docker.html).
*
__*[/list][/i]*__
_
- **Let's skip adding the jetbot software** *(italics above)* **and focus on adding the driver for the WiFi adapter, next. That way, we can avoid having to go back and disable the docker container.**_
__**__
__*
- For the WiFi driver, please follow the [[README](https://github.com/lwfinger/rtl8723bu/blob/master/README.md) of the [[rtl8723bu repository](https://github.com/lwfinger/rtl8723bu).*__
__**__
__*
- If the automatic installation doesn't work, make sure you are in the directory of the cloned repository. Otherwise, you may need to manually install the driver.
*__
__*
- If you run into connection issues after installing the drivers, you may need to run the wifi adapter in [[non-concurrent mode](https://github.com/lwfinger/rtl8723bu/blob/master/README.md#concurrent-or-non-concurrent-mode).
*__
__*[/list]*__
*
- You can try this [[old script](https://github.com/santaimpersonator/sparkfun_jetbot_setup/blob/main/add-on_software/install_edimax_driver.sh) I have for adding the WiFi driver.*
__**__
_
- *I can't guarentee that it'll work. It's been a while and I don't remember if it required another script to be executed before hand or if it was fine as a standalone.*
_
__**__
__*[/list]*__
__*[/list]*__
__*[/quote]*__
*Thank you! this post was exactly what I needed to get things moving :)](https://github.com/santaimpersonator/sparkfun_jetbot_setup/blob/main/add-on_software/install_edimax_driver.sh)](https://github.com/lwfinger/rtl8723bu/blob/master/README.md#concurrent-or-non-concurrent-mode)](https://github.com/lwfinger/rtl8723bu)](https://github.com/lwfinger/rtl8723bu/blob/master/README.md)](https://jetbot.org/master/software_setup/docker.html)](https://jetbot.org/master/software_setup/docker.html)*](https://jetbot.org/master/software_setup/sd_card.html)](https://jetbot.org/v0.4.3/software_setup/sd_card.html)










{kind=link}
{kind=link}
{kind=link}