Hi Doug (@doug_f ),
Just FYI: the way the GNSS is configured by RTK Everywhere is changing. In the next release, that part of the code will be very different. In 2.3, the configuration is defined by Base vs. Rover mode and the entire Base or Rover configuration is applied - when changing mode or making settings changes within that mode. In the next release, the configuration is much more selective and only changes to the configuration are applied. The pointers I give below are only valid for versions up to 2.3.
For the EVK, the relevant code is in GNSS_ZED.ino. configureBase will apply the settings RTCM message rates on UART2. configureBase is called when you enter Base mode and also if you make changes to the Base settings while in Base mode. A flag called gnssConfiguredBase indicates if the settings have been applied; if the settings are changed, that flag is cleared to allow the settings to be re-applied.
As Clive says, most of the RTCM messages will be output as soon as they are enabled. 1005/1006 will be output when survey-in is complete or a fixed-Base position is configured. I think this explains why you see messages being output when you might not expect to?
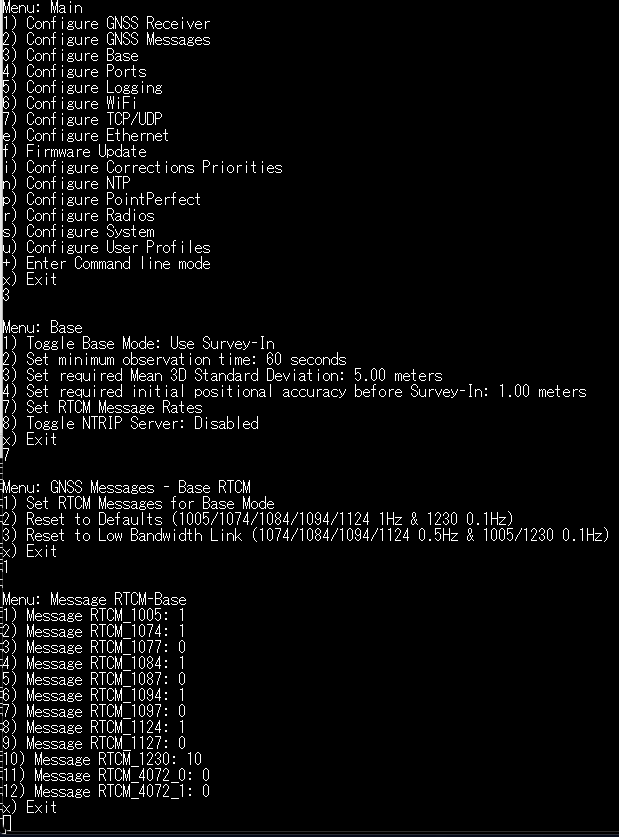
The default Base RTCM message rates are defined in GNSS_ZED.h: 1005,1074,1084,1094,1124 are set to a rate of 1; 1230 is set to a rate of 10 (output every 10th cycle).
Performing factoryReset will set the message rates back to their default. There is a small piece of code which sets all Rover RTCM rates to zero. For Base, the defaults are as defined in GNSS_ZED.h. As soon as you enter Base mode, those defaults will be applied because the gnssConfiguredBase flag is also cleared by the factoryReset.
To zero the RTCM message rates in Base mode, you would need to enter Base mode first, then zero the rates, then apply those rates by exiting the menu.
The message rates are also saved in the ZED internal flash memory. If you reboot the EVK, the message rates are restored by the ZED itself.
Long story short, I think everything you’ve described is as expected?
Best wishes,
Paul