I have a project that needs 12 stepper motors and driver boards. I bought 15 of each to have some headroom, and I’m noticing only 9 are working. I could use some help identifying what’s wrong with the 3 installed motor+driver pairs that are not spinning as this failure rate seems unusually high.
Here is the setup:
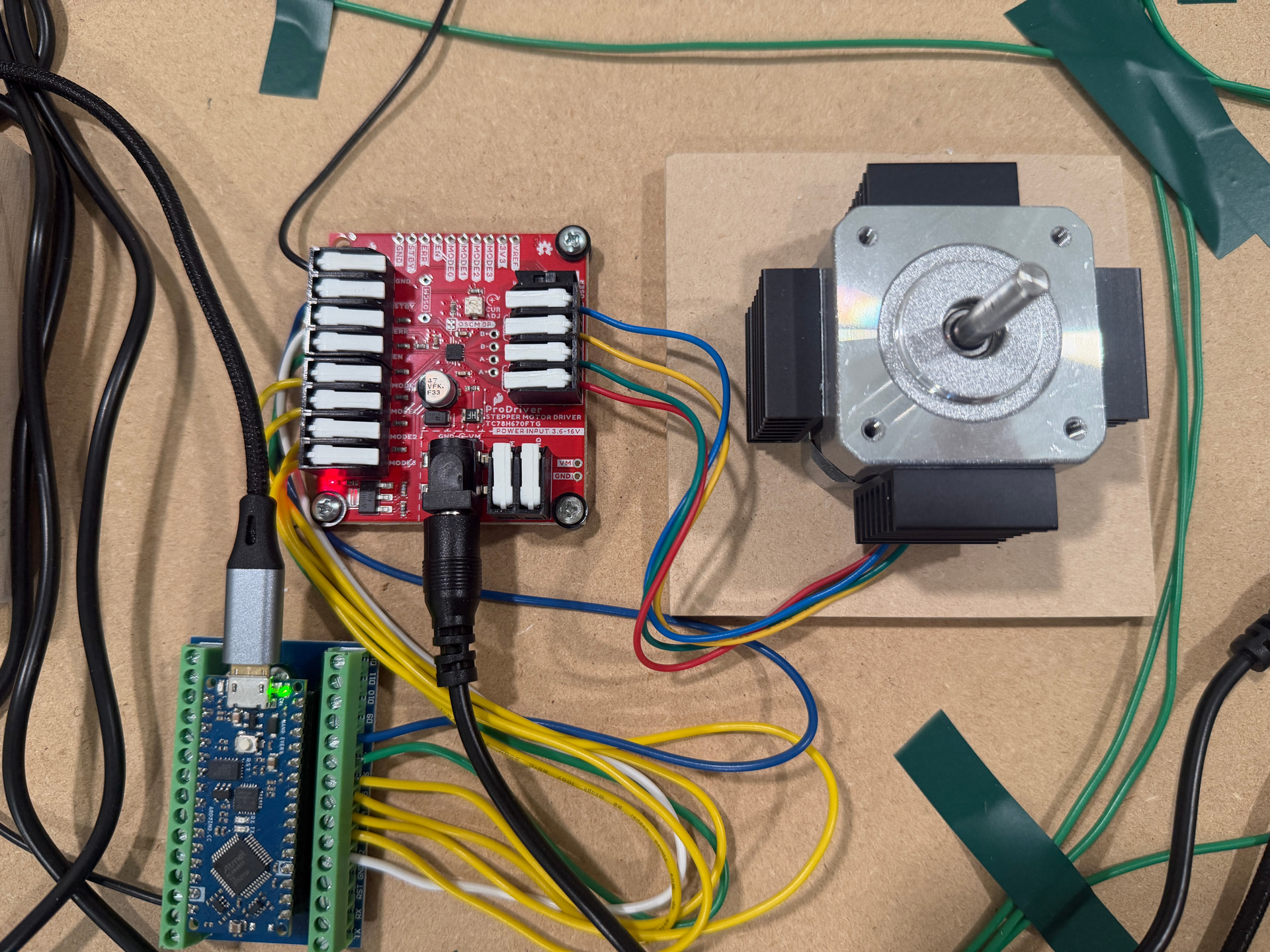
Stepper motor (heatsinks added on by me, but not really needed since the VREF is set very low for the payload I need to spin)
Connection is the same as the example:
ARDUINO → PRODRIVER
D8 → STBY
D7 → EN
D6 → MODE0
D5 → MODE1
D4 → MODE2
D3 → MODE3
D2 → ERR
VREF pot is set to 0.34V to 0.36V
Motor A+ is connected to the red wire, A- to green, B+ to yellow, B- to blue
Resistance between red/green pairs is 34-36 Ω
Resistance between blue/yellow pairs is 34-36 Ω
Resistance between other pairs is infinite/disconnected (e.g., red/blue, red/yellow, green/blue, green/yellow)
If I connect the motor to the breakout board with board and Arduino power disconnected, then turn the shaft by hand, the PWR LED flickers on the breakout board so I think this shows the motor is not burnt out
I am driving the 12 motors with 2x 60W @ 12VDC AD/DC adapters, 6 motors each, so I think I have plenty of current to go around
However, on the 3 failing setups:
The motor makes stepping/clicking sounds, but the shaft does not spin
If I measure VM → GND, I get 12.1N to 12.3V
If I swap the motor for a known working one, the same driver+Arduino combo works fine
It seems like the failure rate on these motors is just very high. I can’t think of anything I’ve done that would break them - I’m a fallible human but am generally experienced (computer engineering major 15 years out of school now).
Curious if anyone has any troubleshooting tips? Hopefully I am just missing something and these parts can be resurrected. Otherwise I may just need to buy another batch and do a big RMA at the end, which doesn’t seem right. I’d rather get to the bottom of what’s actually going wrong here.
Id agree that this failure rate is pretty high here.
It sounds like the motors are trying to step and move the shaft but are being prevented from doing so.
With a problem motor disconnected can you freely move the shaft?
If the coils are mixed up via wiring this can happen but I am confident that is not the cause here since you have had much success with numerous other setups.
It is possible that the motors suffered some trauma during shipping. If a motor was say dropped on the shaft or smashed into something with the shaft I can see this kind of mechanical issue happening.
How was the shipping box? Was the packing material sufficient? Is there any obvious damage to the exterior of any problem motors?
Please check you are not trying to accelerate the motor too quickly. Stepper motors need to be accelerated up to the desired speed. How fast you can ramp the speed depends on the size of motor and the load. If the speed change is too rapid - e.g. a, ‘instant’ step from zero to full speed - the motor will stall, buzz and just get hot. (I’ve done it many times…!)
I don’t know enough about the TC78H670FTG library to know if it supports speed ramping. I suggest experimenting with changeStepResolution and / or the stepSerialclockDelay parameter. You may find that by lowering the speed, all 12 motors start to behave as expected.
Thanks but I’m trying to do 100 steps (half a rotation) over the course of 2000ms, and most of the motors can do it ok. So I think speed is not the problem?
Double-check your GPIO pin numbering. It looks like you’re using a different board so do check the pin numbers match. You can set custom pin numbering if needed.
Try setting VREF to say 0.45V or 0.5V for a brief test with the sticky motors. The current is limited by Ohm’s Law (12V into 36 Ohms), you can’t do any damage. Maybe the VREF circuit is limiting the current lower than 330mA. By testing, briefly, at 0.45V or 0.5V you rule that out.
You can head to returns to submit the return request. In the “Reason for returning” please include a link to this conversation. I am tagging @TS-John and @TS-Russell so they are aware.
Best wishes - and apologies for the inconvenience,
Paul
I’ve submitted the RMA request form for the extra parts. Everything worked ok, but I ended up buying a bunch of extra parts so I could swap out during setup.
Let me know if you need anything else. Appreciate your help on this!