Hello guys,
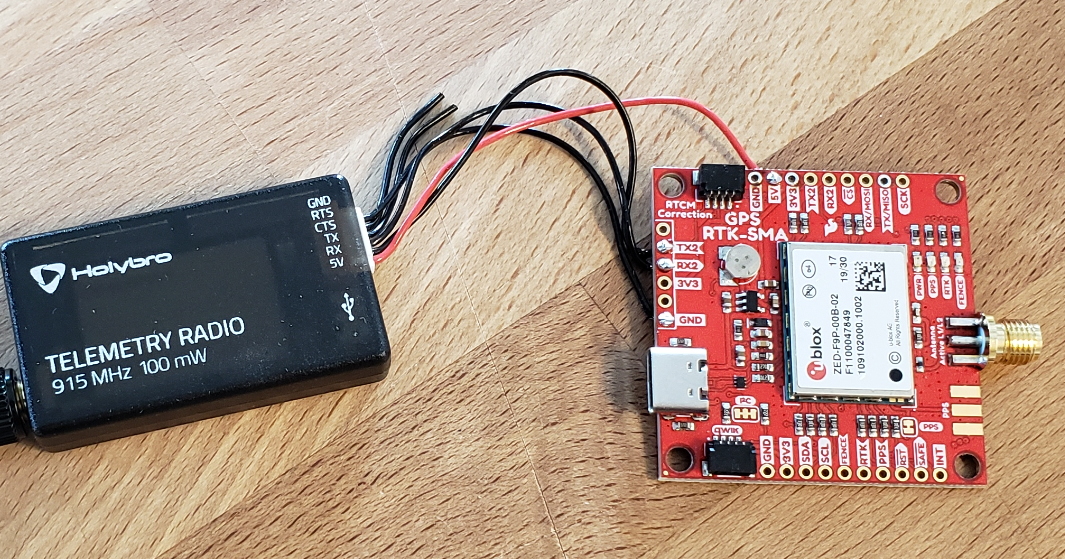
I purchased two ZED-F9P SMA breakout boards and Taoglas MagMAX2 GPS L1/L2 antennas recently to build a RTK system. I used the same hardware (except the antenna) and followed the online tutorial https://learn.sparkfun.com/tutorials/se … rtk-system step by step but not very successful. These are the problems I have:
-
It needs at least 30 minutes to activate the ‘survey in’ mode. I can see the position fix type is ‘Time’ through the PVT message but ‘Time’ is not showing on the u-center configuration view.
-
I enabled the RTCM3.3 correction (USB and UART2) on the base board and I can see RTCM3.3 messages were sent out from the message view box. But my rover can not receive them. I have done the following checks:
- According to the trouble shooting, I connected the 915MHz radio antenna to my computer using a usb cable directly. The radio can receive the correction without any problem. But these corrections have to time.
- I reset both board and swap the base and rover board,the same problem still exist
- I connected the UART2 interface Rx2 to Tx2 and Tx2 to Rx2 using cables, the same problem still exist
- I connected the UART1 interface Rx to Tx and Tx to Rx1 using cables, then setup the correction output as UART1,the same problem still exist
[/list]I swap the radio, the same problem still exist[/list]
[/list]The voltage output (both rover and base) for 5V pin is 3.3V, 3V pin is 1.8V and Voltage outputs for RX2 and TX2 are around 1.6V (keep changing) [/list]
Can anyone provide some suggestions?
Regards
{kind=link}